CAN(Controlled Area Network) 프로토콜은 1980년대 중반 자동차 산업을 위해 개발된 것으로 증가하고 있는 상호연결(interconnected) 애플리케이션 간 데이터 전송에 사용되는 배선의 복잡성(무게·양·비용 등)을 줄이고자 하는 요구에 대응해 왔다.
CAN이 갖는 장점은 자동차 업계뿐 아니라 공장자동화와 의료 애플리케이션 등 여러 시장에서 널리 채택 및 도입되었고, 이에 따라 매년 10억 개 이상의 CAN 노드가 세계 각지로 운송되고 있다.
마이크로컨트롤러(MCU) 역시 이와 유사하게 매년 10억개 이상 출하된다. 현재 통계에는 일부 중복되는 부분이 있으나, 향후 이 수치는 더 증가할 것이다.
자동차 제조업체들의 필요에 부합하는 CAN
전통적인 CAN 통신은 이벤트 기반 통신으로 호스트 컴퓨터 없이 애플리케이션 내에서 마이크로컨트롤러와 주문형반도체(ASIC) 간의 직접 통신을 지원한다. 반도체 기업 간의 통합은 CAN의 비용 효율성 및 다양한 자동차 시스템들과의 호환성을 크게 개선시켜왔다.
2000년대 초반 이후 8비트 MCU가 CAN 프로토콜에 포함되었으며, 최근의 경우 2015년에 최초로 도입된 8비트 MCU 설계 방식에서 새로운 8비트 MCU 기종들이 CAN 애플리케이션의 다양한 시스템 특성들을 수용할 수 있도록 코어독립형주변장치(CIP)를 활용하고 있다. 비용 효율성 이외도 ▲견고성 ▲신뢰성 높은 데이터전송 ▲간단한 구현 등의 이점을 제공하고 있다.
당연하게도 8비트 MCU 역시 비용 효율성 외에도 위와 같은 장점을 갖는다. 따라서 8비트 MCU와 CAN의 결합은 오토모티브 네트워크가 필요로 하는 수많은 요건들을 해결하기 위한 자연스러운 해답이다.
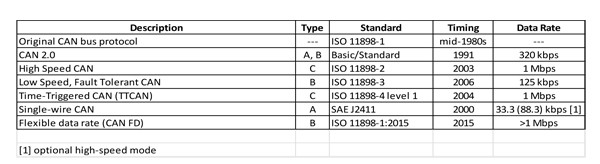
지난 수년 간 CAN은 컨트롤 시스템에 필요한 다양한 요건들을 충족시킬 수 있는 역량을 증명해왔다. 오토모티브 네트워크의 발전에 따라 시간 기반(time-triggered), 결함 허용(fault-tolerant), 싱글-와이어 통신, CAN FD(CAN with Flexible Data rate) 등의 여러 다른 속성들이 추가되면서 CAN 사양이 확대됐다. 표1은 CAN이 30년 전 처음 도입된 후 지금까지 등장한 CAN의 다양한 유형들을 보여준다.
네트워킹 센서와 액츄에이터부터 편의장치까지 자동차 엔지니어들은 비용 절감을 목적으로 근거리 통신망(LIN) 프로토콜을 이용해 왔다. 그러나 싱글-와이어 마스터-슬레이브 네트워크인 LIN은 CAN의 하드웨어 및 소프트웨어 양측면 모두의 변경을 필요로 한다.
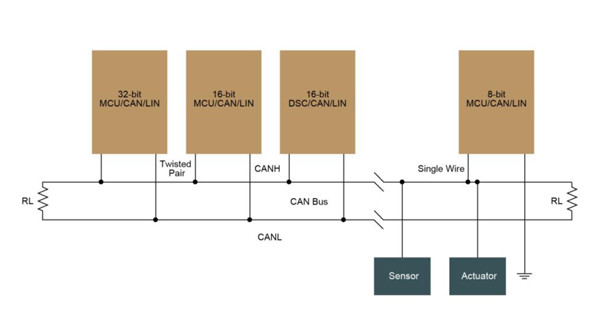
CAN을 위한 최신 오토모티브 애플리케이션에는 액세스 컨트롤, 배터리 충전/관리, 진단 장비 등이 포함된다. 이런 기능들, 특히 타 CAN 컨트롤 시스템의 데이터에 대한 액세스를 필요로 하는 다른 차량 요건들로 인해 8비트 MCU/CAN의 이용이 더욱 증가하고 있다. 그림1은 기존의 CAN 버스에 8비트 MCU/CAN 노드를 추가하는 간편한 방법의 예를 들고 있다.
글 : 에드윈 로메로(Edwin Romero) / 마케팅 매니저 / 마이크로칩테크놀로지