Molex has been selected by the editors of Autonomous Vehicle Technology(AVT) magazine for the second year in a row as a recipient of the 2020 ACES Award.
Molex is recognized in the category of Connectivity for its next-gen solution that fuses a telematic control unit(TCU) to an antenna in a sleek, hidden design.
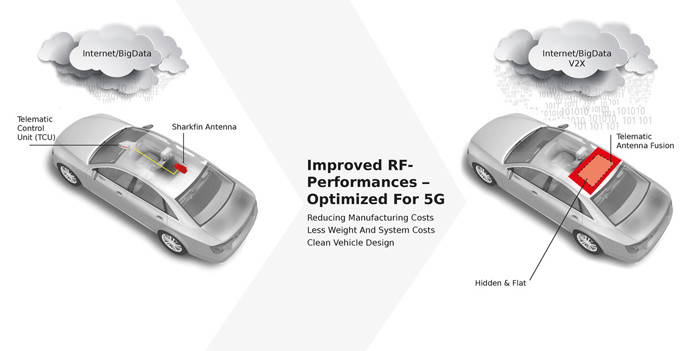
As connected vehicles continue communicating to the digital environment, the role of antennas and integrated high-performance TCUs is increasingly crucial. With its extensive expertise, Molex fused the two in an innovative solution to create the TCU Antenna Fusion.
It not only improves RF efficiency and reduces system costs, but its industrial design allows OEMs to implement a hidden, high-performance antenna. The innovation helps ensure seamless connectivity, which is critical for smart cars to transport significant amounts of data and especially in the future moving to 5G mmWave solutions.
“Molex is honored to be awarded by Autonomous Vehicle Technology magazine as the ACES award shows the market relevance of Molex TCU Antenna Fusion for the connected and automated vehicle of the future. Molex innovations and expertise are driving solutions that are creating significant value for our automotive customers,” said Dietmar Schnepp, product director vehicle communication devices, Molex.
Winners of the AVT ACES Awards were evaluated and chosen based on editor, industry expert and reader inputs. Only the most innovative technologies, products, and services of the year in the areas of vehicle autonomy, connectivity, electrification, and mobility services(ACES) are considered.