![[사진=게티이미지뱅크]](https://cdn.itbiznews.com/news/photo/202109/48789_44181_1654.jpg)
라이다(LiDAR)는 빛 감지 및 거리측정(light detection and ranging)의 준말이다. 레이저를 통해 물체로 발사한 빛이 되돌아오기까지의 시간을 측정해 거리를 감지하는 기법이다. 애플리케이션에 따라 사용하는 파장은 다양하지만, 일반적으로 이용되는 파장은 적외선(IR)이다.
인간의 뇌는 주로 자동차를 운전할 때와 같은 상황에서 매우 중요한 상대적 깊이, 거리, 그리고 물체의 크기를 유추하는 데 능숙하다. 그러나 이미징 시스템의 경우 2D 이미지로 3D 장면을 표현하는 표준 이미지 센서로 인해 이러한 작업을 수행하기 어렵다.
인간의 눈과 유사하게 두 개의 이미지 센서를 입체적 배열로 사용하면 뎁스 데이터(depth data)는 추출할 수 있지만, 거리의 정확도와 주변 조도에 대한 의존도에 제한이 있다.
라이다를 통해 얻은 뎁스 데이터를 이용하면 빛 조건과 무관하게 깊이 측정이 가능하며, 이미지의 모호성을 제거해 장면 내의 물체를 구별하여 의미를 부여할 수 있다. 물체로 발사되어 반사된 빛의 펄스와 정확한 시간 측정을 결합하면 물체의 거리를 계산할 수 있다.
자동차 업계에는 특히 국제자동차기술자협회(SAE) 레벨 L3 – L5에서 작동하는 반자율주행 차량에 적용되는 라이다와 관련된 많은 애플리케이션이 존재한다.
라이다는 자동차 업계에 많이 사용되며, 특히 차량 주변의 물체 감지부터 고속도로의 전방 수백 미터를 확인해야하는 국제자동차기술자협회(SAE) 자율주행 레벨3~5가 적용된 반(semi) 자율주행 차량의 애플리케이션에 많이 사용된다. 배달로봇이나 자율인식(autonomous perception)이 요구되는 타 애플리케이션에서도 활용되고 있다.
이 외에도, 라이다는 처리 가능한 3D 뎁스 지도(depth map)를 높은 정확도로 빠르게 생성하는 실외 애플리케이션에서도 널리 사용된다. 이는 전통적인 측량 기법을 사용했다면 며칠을 작업해야 할 프로세스다.
가령 라이다는 농업에서 밭이나 토지를 측량해 지도를 만들고 농작물 상태를 평가하는 데 사용된다. 이로써 농부들은 최상의 농약이나 비료를 선택할 수 있을 뿐만 아니라 농작물 수확량을 모델링하고 예측할 수 있다.
저장고에 저장된 곡물이나 탱크에 저장된 액체물의 양은 내용물과 직접 접촉할 필요 없이 저장고나 탱크 상단에 장착된 라이다를 통해 즉시 측정할 수 있다.
환경 단체들은 삼림 벌채 및 해안 침식을 측정하고 빙하 퇴행을 모니터링하는 데 라이다를 종종 사용한다. 또한, 이러한 애플리케이션으로는 무인항공기(UAV)나 드론에 라이다를 탑재해 원거리에 접근 불가능한 지역을 실제로 직접 가지 않고도 측량할 수 있다.
스마트공장에서는 무인운반차(AGV)에 라이다를 탑재해 원자재를 수송 및 프로세싱하고 발송지역으로 완제품을 운반한다. 라이다는 스마트공장에서 로봇을 통해 활용되면 매우 강력한 성능을 발휘하며, 로봇이 정교한 작업을 수행하게 돕는 것은 물론 주변에 사람이 있을 때 로봇이 이를 인지하여 안전하고 신중하게 작동하도록 돕는다.
라이다는 원치 않거나 의도치 않은 침입으로부터 특정 영역을 보호하는 안전 보조 장치로도 사용될 수 있으며 위험 물질이 있거나 중장비가 작동하는 경우에도 유용하다.
모든 조명 조건에서 효과적으로 작동할 수 있는 라이다의 특징은 라이다가 이러한 유형의 애플리케이션에서 항상 신뢰할 수 있는 보호 도구의 역할을 할 수 있음을 의미한다.
라이다 유형
라이다의 가장 일반적인 작동 시스템인 직접 비행시간거리측정(direct time-of-flight, dToF)의 원리는 매우 간단하다. dToF 기법은 빛의 펄스가 목표체로 이동했다가 센서로 다시 돌아오는 데 걸리는 시간을 측정한다.
빛의 속도는 이미 알려진 물리적 상수이므로 송신기 및 검출기로부터 반사체까지의 거리를 계산하는 작업은 간단하다.
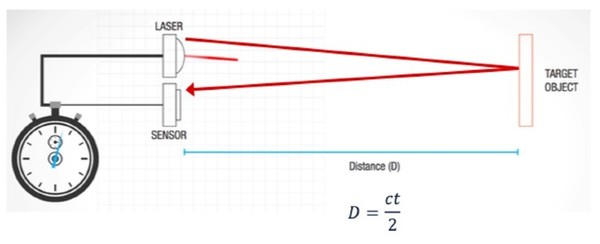
dTOF 기법은 일반적으로 가장 자주 사용되는 레이저를 비롯해 광원에서 방출되는 단일의 매우 짧은 펄스를 사용하여 정확한 타이머를 동시에 활성화한다. 빛의 펄스가 거리내의 물체에 닿으면, 레이저와 주로 함께 위치한 고감도 조도 센서로 되돌아온다. 되돌아온 빛의 펄스가 감지되면 타이머는 정지되며, 빛이 물체까지 이동했다 돌아오는 데 소요되는 시간이 판독된다.
전송되는 펄스와 수신되는 에코(echo) 사이에 소요된 시간(t)을 알고 있는 경우, 빛의 상수(c) 속도를 사용해 물체까지의 거리(D)를 쉽게 계산할 수 있다.
dToF 기법은 신속하고 여러 개의 에코 측정이 가능해 라이다의 시야 내에서 여러 개의 물체를 감지할 수 있다. 장거리 및 단거리(0.1m~300m) 애플리케이션 모두에서 사용할 수 있으며, 모든 거리에서 높은 수준의 정밀도를 제공한다.
라이다의 대체 접근법인 간접 비행시간거리측정(indirect time-of-flight, iToF)은 레이저에서 나오는 빛의 연속파를 이용한다. 해당 기법은 소요된 ToF를 직접 측정하지 않고 송신 파형과 수신 파형 간의 위상 차이(phase difference)를 사용해 결정한다.
iToF 기법은 10m 미만의 상대적으로 단거리인 애플리케이션에 보다 적합하며, 조명 조건의 격차가 훨씬 큰 실외보다 격차가 덜한 실내에 더 적합하다. 하지만 가장 강한 에코만 감지할 수 있어서 단일 물체만 감지할 수 있다.
세 번째 유형은 단거리 및 장거리 애플리케이션에 사용되는 주파수 변조 연속파(frequency-modulated continuous wave, FMCW)가 있다.
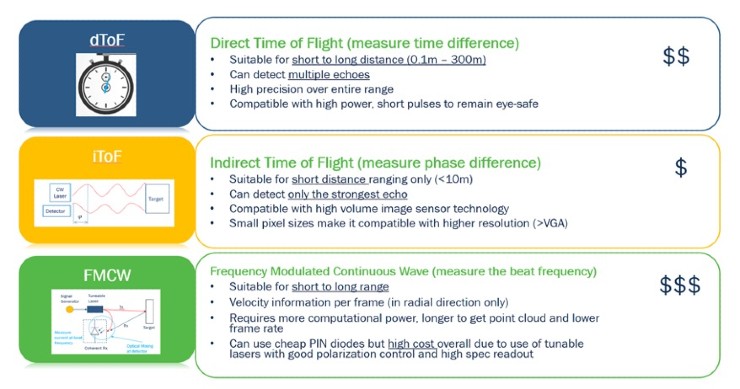
이 기술은 파장가변 레이저(tunable laser)를 사용해 검출기에서 반사된 빛과 혼합된 연속적인 빛의 파장을 생성한다. 이러한 혼합을 통해 로컬 파형과 반사된 파형 간의 비트 주파수(beat frequency)를 생성하면 물체 거리와 방향 속도를 계산할 수 있다.
FMCW는 뛰어난 거리 측정 성능을 제공하고 방향 속도 정보를 포착할 수 있지만, 편광 제어 기능이 있는 파장가변 레이저를 사용하고 레이저 및 검출기에 특수(exotic) 반도체가 필요한 단파적외선 파장에 의존하기 때문에 시스템 구현을 위한 비용이 크게 발생한다.
글: 조셉 노타로(Joseph Notaro) / 오토모티브 비즈니스 전략 부사장 / 온세미
관련기사
- 자일링스, 모토비스와 전방 카메라 인식기술(OD) 고도화
- 라이다 핵심기술 中에 유출한 KAIST 교수, 징역형 집행유예
- 한라홀딩스, 전기차(EV)·자율차 애프터마켓 신사업 추진
- 라이다(LiDAR) 시스템 설계에서 요구되는 필수요소 ①
- 퀄컴, 美 조지아주 스마트시티에 C-V2x 기술 생태계 구현
- 디지털트윈(DW) 기술을 활용한 전기차(EV) 파워트레인 설계-검증의 중요성
- 스트라드비젼, 中 시장 확대…객체인식(OS) 툴킷 ‘SVNet’ 업데이트
- [포토] 라이다 개발 스타트업 방문한 김용래 청장
- “300m까지 라이다 감지거리 확장”…온세미, 전장그레이드 SiPM 어레이 공개
- 베스텔라랩, SOC-ICT 우수기업으로 장관상 수상