완전자율주행이 가능한 차량이나 운송수단이 현실화되면서 인공지능(AI), 머신러닝과 같은 신속한 자동 의사결정 기술의 개발에 많은 관심이 모아지고 있다. 이러한 솔루션의 목표는 주변을 인식하는 사람의 능력을 복제하고 향상시켜 더욱 효율적이고 안전한 방식으로 차량을 운행하는 것이다.
자율주행차량 제어에 있어 가장 중요한 점은 차량의 작동 특성과 주변 환경을 인식하는 제어 시스템의 눈과 귀가 되는 차량 센서를 지속적으로 향상시키는 것이라고 할 수 있다.
AI와 의사결정 시스템은 차량 경로를 계획하고 환경에 대응하는 반면, 센서는 차량 주변의 현재 및 개발 상태에 대한 정확한 데이터를 이러한 알고리즘을 실행하는 제어 시스템에 제공해야 한다. 그리고 정확한 알고리즘 개발은 정확한 센서 데이터의 사용 가능성에 일정 부분 의존하고 있다.
자율주행차 개발에 있어 가장 중요한 환경 감지 데이터를 제공하는 아래의 4개 차량용 센서를 살펴보자.
1. 비주얼 스펙트럼 카메라는 사람의 눈과 같이 움직임 감지, 깊이에 대한 인지뿐만 아니라 정지등, 비상등 및 정지신호와 같은 사물을 감지하는 색상에 대한 데이터를 제공한다.
2. 레이저거리측정장치(LIDARs)는 저대역 적외선 스펙트럼을 활용해 센서에서 직접 보이는 차량 주변의 물체에 대한 센티미터 정확도 수준의 위치 측정 데이터를 제공한다.
3. 초음파 센서는 차량 주변의 사물에 대한 근접 측정값을 제공해 도로 경계석 위치를 감지하는 것과 같은 자동주차 기능에 유용하게 활용된다.
4. 무선주파수거리측정 센서(Radar)는 밀리미터파 주파수를 사용하여 넓은 범위의 물체 및 장애물을 감지하고, 차량 주변 환경에서 여러 요인의 속도 및 방향을 추적하는 기능을 한다.
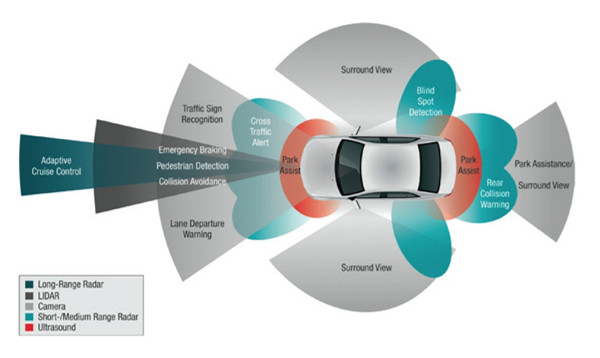
능동적 주행안전시스템에 일반적으로 사용되는 레이더 시스템은 단거리 레이더(Short-range radar, SRR), 중거리 레이더(Medium-range radar, MRR) 및 장거리 레이더(Long-range radar, LRR)로 분류할 수 있다.
1. LRR 시스템은 일반적으로 전방 센서에 적용되며, 어댑티브 크루즈 컨트롤(Adaptive Cruise Control, ACC)와 사전 충돌 감지 기능을 제공한다. 77Ghz의 LRR 시스템은 일반적으로 상대적으로 좁은시야(FoV) 내에서 차량 전방의 0.5m~250m 범위를 스캔할 수 있습니다.
2. MRR 시스템은 일반적으로 차량의 모서리와 사각 지대를 감지하고, 차선 변경 시 다른 차량을 관찰하며, 측면이나 모서리 충돌을 방지하는데 사용한다. 일반적인 MRR 시스템은 79GHz 대역에서 작동하여 LRR 시스템과의 간섭이 발생하지 않고 높은 측정 정확성으로 50~60m의 범위 내 환경을 관찰하는 역할을 한다.
3. SRR 시스템은 근접 충돌 경고나 안전에 적용되며, 제한적으로 주차 지원 시스템에도 적용된다.
대부분의 자율주행차 개발자들은 앞서 설명한 4개의 주요 시스템 중 레이더, 라이다, 비주얼 카메라의 조합을 활용하여 환경을 모든 방향에서 연속적으로 관찰할 수 있는 기술개발에 집중하고 있다.
레이더는 비주얼 카메라 및 라이다 시스템과 비교했을 때 보다 안정화되고 비용이 낮은 기술로, 궂은 날씨에서도 월등한 기능을 제공하는 이점이 있다. 레이더 센서는 이미 기존의 여러 승용차의 안전 시스템에 적용되고 있다. 또한, 도로에서 주변 차량을 확인하여 장애물로 인해 라이다 또는 카메라로 볼 수 없는 차량의 이동 또는 정지를 모니터링할 수도 있다.
라이다 시스템은 일반적인 승용차에 사용하기에는 아직 가격대가 높지만, 모든 방향에 대해 시야에 들어오는 물체들에 대해서 매우 정밀한 거리 측정을 할 수 있다.
비주얼 카메라 센서는 자율주행제어에 있어 필수적이라고 할 수 있다. 운전자가 눈으로 감지하는 것과 마찬가지로 교통 신호 모니터링, 차선 확인, 브레이크등 감지에 있어 색상과 형상을 구분하는 능력은 중요하다.
최근의 차량 레이더는 20년 전 우주항공 및 방위 연구소에서 사용되던 고급 기술이 채택되고 있다. 새로운 RF-CMOS 및 SiGe IC 공정에 기반한 무선주파수집적회로(RFIC) 기술의 진보는 높은 칩 레벨의 집적화, 더 소형화된 패키지 및 센서, 부품수 감소, 낮은 전력 소비량, 고성능화 그리고 이러한 산업에서 가장 중요한 초 저가화를 이뤄내고 있다.
안테나 설계와 소재 기술의 발전은 높은 이득(gain)과 부엽(sidelobe) 레벨 제어 등 중요한 기능을 제공하는 고성능의 안테나 설계를 지원하고 있다.
24GHz, 77-79GHz와 향후의 122-138GHz 대역에서 밀리미터파 대역 자동차 센서를 개발하기 위해서는, 빠듯한 개발 스케줄을 충족하고 까다로운 성능 요구 사항을 달성 할 수 있도록 모델링과 시뮬레이션이 합리적으로 활용되어야 한다.
레이더 센서 개발자들은 고주파수 전자기장 솔버를 활용하여 레이더 안테나의 프로토타입을 개발하고 설계하며 최적한다. 새로운 안테나 토폴로지 및 안테나 성능 관점에서의 패키징 및 센서 장착 구조의 효과에 대한 가상 프로토타입을 개발하는 것은 성공적인 단일 프로토타입 설계에서 필수라고 할 수 있다.
실물의 프로토타입 설계, 개발·테스트라는 기존의 안테나 설계 방식은 많은 비용이 소요된다. 촉박한 개발 및 검증 시한을 맞추기 위해서는 프로토타입의 개발과 테스트를 지원하는 모델링 및 시뮬레이션 방식을 창의적으로 활용해야 하는 이유가 여기에 있다.
글 : 숀 카펜터(Shawn Carpenter) / 프로덕트 매니저 / 앤시스