![[source=velodyne lidar]](https://cdn.itbiznews.com/news/photo/202106/39928_35605_3253.jpg)
라이다(LiDAR)는 레이더(RADAR)와 유사한 구조를 갖고 있으나 전파 대신 빛을 사용한다는 점에서 다르다. 라이다는 반사된 빛과 정확한 타이밍을 이용해 물체의 거리를 측정한다.
라이다는 높은 해상도의 깊이 및 각도 정보를 이용하여 정확도 높은 뎁스(Depth) 센싱을 가능하게 한다. 적외선 송수신기를 능동적으로 사용할 경우 적외선 영역에서도 사용될 수 있어 모든 광 스펙트럼 영역에서 동작 시킬 수 있다.
라이다는 단순한 거리 측정하는 것보다 더 정교한 기술이다. 3D 매핑과 이미징에도 사용되는 라이다는 엔지니어링 측면에서 매우 매력적이며, 실용적인 기술이다.
빛과 비행시간(Time of Flight, ToF)
오늘날 라이다 기술에 대한 서로 다른 방식들이 존재하지만, 가장 이해하기 쉬운 방식은 싱글 샷(single-shot) 직접 비행시간거리측정(dToF) 방식이다.
이 방식은 일반적으로 레이저 형태의 광원으로 광 펄스를 방출시키고 내부 타이머를 동작시키게 된다. 광 펄스는 목표물에 부딪히면서 보통은 레이저와 같은 위치로 정렬시킨 센서에 되돌아오며 내부 타이머는 정지된다.
전송되는 펄스와 수신되는 반사파 사이의 시간(t)을 알면 빛의 속도 상수(c)를 이용해 목표물까지의 거리(D)를 간단히 계산할 수 있다.
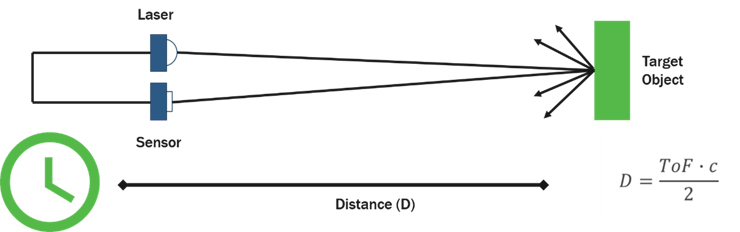
dToF의 대안이 되는 간접 비행시간거리측정(iToF)에서는 빛의 연속적인 사인파를 사용한다. iToF는 전송된 파형과 반사된 파형 사이의 위상 차이를 통해 비행시간(ToF)을 계산하게 된다.
2개 접근 방식 중에서는 보통 iToF가 일반적으로 사용된다. iToF는 보통 비교적 짧은 거리의 애플리케이션에 더욱 적합하며, 주변광의 조도가 잘 제어되는 곳에서 더 잘 동작한다.
이와 반대로 dToF는 장거리 및 단거리 애플리케이션에서 사용될 수 있다. 또한 비교적 신속하게 동작함과 더불어 복수의 반사파를 측정할 수 있으므로 여러 목표물을 감지할 수 있다.
라이다 시스템이 효과적으로 동작하려면 시스템이 동작하고 있는 환경의 주변광 조건에서 리턴 신호가 감지돼야 한다. 물론 빛을 제어할 수 있는 실내 환경일수록 유리하지만, 라이다가 흥미롭게 검토되고 있는 애플리케이션의 대부분은 야외에서 동작하기 때문에 그에 따른 해결책이 필요하다.
신호대잡음비(SNR) 개선
ASTM G-173-03 태양복사조도모델(Solar Irradiance Model)을 사용하면 가시광선 스펙트럼인 500nm(나노미터)부터 600nm 사이의 파장에서 태양 노이즈(빛)가 가장 크게 보이는 것을 확인할 수 있다.
스펙트럼의 약 905nm 근처에 위치한 근적외선(NIR) 부분에서의 노이즈는 절반으로 감소하게 되는데, 이는 해당 파장을 사용할 때 반사된 빛이 쉽게 검출될 수 있음을 의미한다.
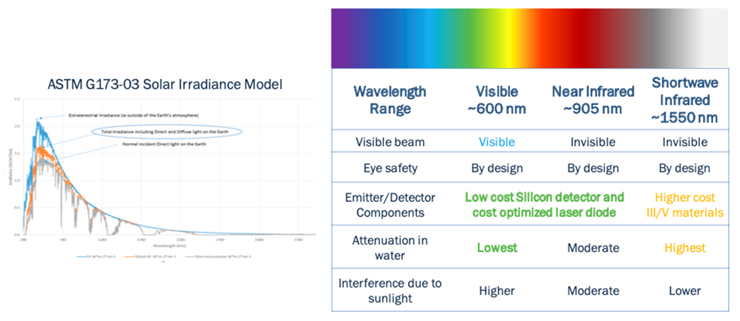
약 1550nm 근처의 단파 적외선 범위로 이동하면 보다 좋은 결과를 얻을 수 있지만, 방출기와 수신기의 가격이 다소 높아지기 때문에 가격 대비 성능을 고려하면 NIR 범위(약 905nm)가 가장 적합하다.
직관적으로도 단순히 방출기의 파워를 증가시키면 SNR을 개선할 수 있으면서도 라이다 시스템의 정확도 및 범위도 개선이 가능함을 알 수 있지만, 방출된 빛은 인간과 동물에게 해로울 수 있어 BS EN 60825-1:2014와 같은 국제표준에서 방출할 수 있는 파워를 규정하고 있다.
사용 가능한 제한적인 파워를 사용하여 유효 범위를 늘리려면 다른 기술을 추가해야 한다. 이때 멀티 샷 (multi-shot) 조명을 사용하면 SNR과 범위가 대폭 개선되는 한편 각 펄스 내의 에너지도 낮게 유지할 수 있다.
이 접근 방식에서는 복수의 펄스가 발사되며, 감지된 반사파에 기반한 타임스탬프 히스토그램이 생성된다.
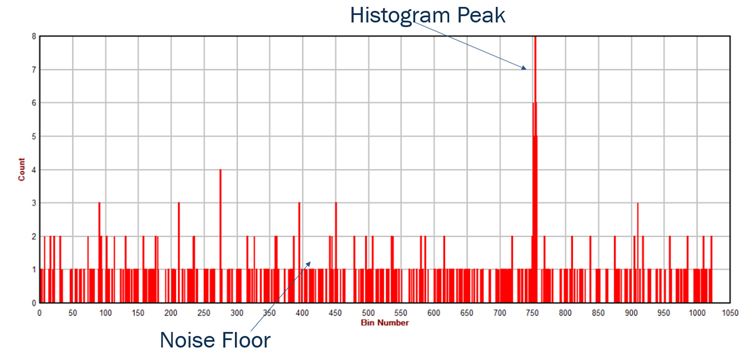
생성된 히스토그램을 살펴보면, 일반 환경에 존재하고 있는 주변 광자들은 랜덤하게 검출되면서 일정한 높이의 ‘노이즈 플로어(Noise Floor)’를 형성하고 있고, 동일한 시간 간격을 가지고 되돌아오고 있는 대부분 반사파가 검출되는 히스토그램 피크에 목표물이 위차하고 있음을 알 수 있다.
글: 에델 캐시먼(Edel Cashman) / 애플리케이션 엔지니어 / 온세미컨덕터
관련기사
- 퀄컴, 美 조지아주 스마트시티에 C-V2x 기술 생태계 구현
- 산업용 IoT(IIoT) 애플리케이션을 위한 라이다(LiDAR) 기술 ①
- 카네비컴, 산업용 라이다 센서 ‘VL-R2’ 이달 양산 개시
- 엔비디아, 8세대 자율주행 플랫폼 ‘하이페리온’ 공개
- 콘티넨탈, 360도 탐지 가능한 장거리 레이다 센서 2종 공개
- 서울로보틱스, 마크니카와 파트너십…日시장 유통망 확보
- 카네비컴·한자연, DCU 기술 이전 계약…내년 상반기 상용화
- “300m까지 라이다 감지거리 확장”…온세미, 전장그레이드 SiPM 어레이 공개
- 퓨런티어·서울대, 자율주행기술 고도화 협력…공동연구 ‘맞손’
- 라이다(LiDAR) 시스템 설계에서 요구되는 필수요소 ②